Light up your micro:bit with love by showing a heart
Light up your micro:bit with love by showing a heart
Make your micro:bit’s heart beat using loops
Animate your own animals on the micro:bit display
Use your micro:bit to express how you’re feeling
Shake your micro:bit to make a silly face appear
Make flashing happy and sad faces
Create sunshine on your micro:bit
Make a flashing sunbeam animation
Make your micro:bit light up when the sun comes up
Turn your micro:bit into an animated name badge
Shake your micro:bit to make random numbers
Make a toy to tell your fortune

Recreate a classic game with two micro:bits
Make micro:bit dice with dots

Make your own step counter with a micro:bit

Make an energy-efficient step counter

Make the Scratch cat jump using your micro:bit

Control a mysterious musical instrument in Scratch

Make a micro:bit Scratch boom-box
Make your own wireless game controller for Scratch

Paint a picture in Scratch by moving your micro:bit
Play chords on a micro:bit guitar with Scratch
Turn your micro:bit into a simple compass
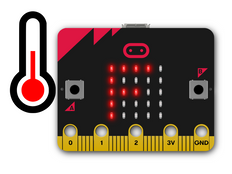
Make a simple thermometer with your micro:bit
Create an automatic light that turns on when it’s dark.
Use buttons to play different tunes

Teleport a duck between micro:bits using radio
Count skips, jumps, birds - or anything!
Can't agree on what to do? Let your micro:bit decide!
A visual and audible alarm when something is picked up
Regulate your breathing and relax

Prototype turtle-safe beach lighting
Prototype safer fishing nets
Share some happiness with radio

Build a prototype radio animal tracker
Add an extra emotion with touch
Clap your hands to make the micro:bit heart beat
Make lights flash to the rhythm
Measure the noise around you
Touch your micro:bit to light up the heart
Express yourself with sound
Make a multi-sensory toy
Help practice your music
Control lights with sound
Be given a random direction when walking

Count different species of plants and animals.

See if someone else has drunk from your bottle.

Protect your cookies with a light sensor alarm.
Let your BBC micro:bit get you up in the morning.
Test your knowledge of times tables with this project.
An interactive physical computing exploration
Play a festive animation when it gets dark.
Measure temperature, sound and light levels around you

Use loops to help create a dance routine.
Shake your micro:bit to make it snow.

Shake your micro:bit to hear a cheerful tune.

Play happy and sad sounds using buttons.

Make a more accurate step-counter
Create a simple compass to show which way is North
Track high and low temperatures with your micro:bit
Connect headphones or speakers to make noise

Program your micro:bit to play a tune
Teleport ducks in a multi-player game
Swap secrets with a friend using radio
Sense how warm or cold it is outside
Keep precious things close with 2 micro:bits
Multi-player radio treasure hunt game

Use lists to manage your activity picker
Use functions to convert Celsius to Fahrenheit
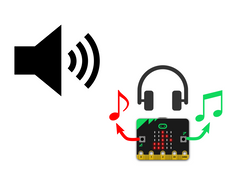
Add a volume control to your sound projects
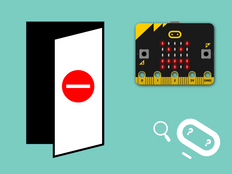
Has anyone opened your door?
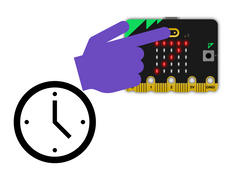
Simple timer for the new touch logo
Make a stopwatch using the touch logo
Measure noise levels around you
Code your own electronic pet
Make a practical tool with sound
Find North by sound and light
Blow out an electronic candle
Measure length of applause

Survey traffic, wildlife or anything around you!

Record and study data about the world around you
Use data logging to make a better step counter.
Investigate if a material conducts electricity.

Test which materials are best sound insulators

Use data science to improve your sports skills
Turn your micro:bit into a voice changer.

Send encrypted radio messages.
Play ‘hot potato’ using a micro:bit!

A fun two-player game using radio.
Use your micro:bit to measure distances.

Generate random phrases to use in a poem.
Find out if a number is odd or even.

Make a smart exercise timer using AI

Scare your friends with your micro:bit.
Use AI to detect and time specific activities

Use storytelling to introduce AI.

Investigate materials to see how much light they let through

Complete an electrical circuit with your body!

Measure sound over distance.

Discover evaporation rates in different locations.

Investigate the thermal insulation properties of materials.

Decide where to put a solar panel with your micro:bit.

Clap to turn on the lights.

Protect your cookies with an audible alarm.
Sense when something is getting close

Create and play a micro:bit guitar
Play chords on your micro:bit guitar
Change octaves on your micro:bit guitar or keyboard
Make a radio-controlled burglar alarm
Make an alarm that goes off when lights go on

Create a wireless intruder alarm
Make your own micro:bit wireless door alarm.
Make a wireless intruder alarm to detect movement

Make a 2-player reaction game
Glowing micro:bits that mimic fireflies
Store temperature readings
Measure the strength of light in different places
Time how long your lights are on
Calculate your energy costs

Log time spent running, walking and being still.

Send a duck between two micro:bits and hear it say hello!

Counts 10 steps then plays a tune.

Play rock, paper, scissors with sound effects.